

Overview
Identifying and mitigating uncertainties during the development and testing phases is key to overcoming the technological challenges of safe automated driving. The increasing use of AI methods gives rise to data- and model-related uncertainties that must be taken into account. These are in the focus of Beyond Validation AI. The overall goal of the Research Impulse is a permanent interdisciplinary competence center for improving safety in AI-based connected mobility systems through a deep understanding of sources of uncertainty, their propagation, and impact on decision-making.
The project is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) - FIP 135/1, project number 549102058.

Research Objectives
- Expansion of fundamental scientific understanding for managing uncertainties—particularly regarding AI components—in safety-critical areas, such as perception, prediction, and motion planning for automated vehicles.
- Quantification and reduction of uncertainties in perception, prediction, and motion planning for automated vehicles, as well as increasing vehicle safety by incorporating these sources of uncertainty into decision-making.
- Use of AI methods in safety-critical components of automated vehicles: when applying AI techniques, both data-driven and model-based uncertainties must be considered during the design and testing phases.

Structural Objectives
- Multidisciplinary collaboration of researchers at THI, focusing on perception, vehicle safety, AI, testing methods, human-machine interaction, as well as the contribution to and expansion of national and international research networks.
- Further development of the research profile at THI in the field of AI, automated driving, and vehicle safety, with a focus on addressing uncertainties. Hereby, the recruitment of highly qualified research staff—taking diversity into account—is a central priority.



Overall structure
The main structure of the research impulse is given by the four focus areas that correspond to the modular approach for the consideration of uncertainties in cooperative automated driving: I. Perception, II. Prediction, III. Planning, and IV. Validation. In addition, complementary research topics dealing with resource efficiency in AI-based systems and E/E architectures are planned.
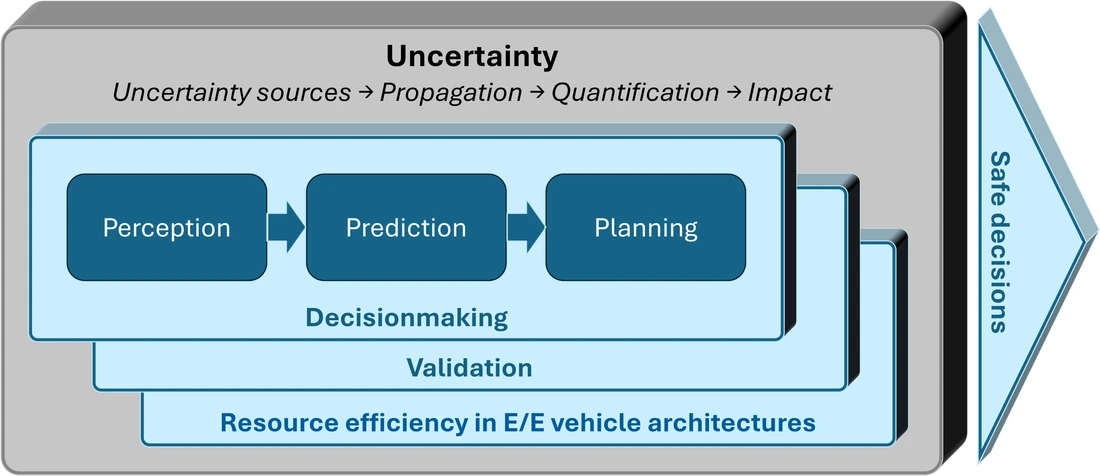
Focus area I, Perception, explores uncertainties in AI-based raw sensor data processing and ways to reduce them, including V2X communication and cooperative perception. Focus area II, Prediction, develops methods to perform prediction by propagating uncertainties from the perception and incorporating intrinsic prediction uncertainties; additionally, uncertainties are reduced using contextual knowledge about behavioral models of traffic participants and the overall traffic situation. Focus area III, Planning, addresses motion planning under uncertainties using reinforcement learning and statistical planning methods. Focus area IV, Validation, uses insights from perception, prediction, and planning uncertainties to better evaluate the Operational Design Domain and requirement specifications, optimizing validation of AI-based models in automated vehicles. Part V, complementary research topics, addresses implementation aspects for AI models in Cooperative Automated Driving systems, including uncertainties in E/E architectures, efficient management of simulation and real-world data, and resource-efficient neural network implementation through model compression or hardware constraints.





.")
 for the research initiative “Beyond Validation AI” (symbolic image: ChatGPT).")
Speaker

Prof. Dr.-Ing. Michael Botsch
Phone: +49 841 9348-2721
Room: K209
E-Mail: Michael.Botsch@thi.de
Project Coordinator

Phone: +49 841 9348-2725
Room: P108
E-Mail: Karthikeyan.Chandrasekaran@thi.de

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)


